Uç Yapay Zekâ ile Endüstriyel Otonom Taşıyıcı Araçların Gerçek Zamanlı Hata Teşhisi ve Durum Takibi

Üniversitemiz Mühendislik Mimarlık Fakültesi Bilgisayar Mühendisliği Bölümü öğretim üyesi Dr. Eyüp Çinar’ın yürütücülüğünü yaptığı TÜBİTAK 2232 Lider Araştırmacılar Programı kapsamında yapılan çalışmalarda üretilen makalelerden biri olan ve araştırmacılar Prof. Dr. Ahmet Yazıcı, Doç. Dr. Kemal Özkan, ve Öğr. Gör. Özgür Gültekin’in ortak çalışması “Real-Time Fault Detection and Condition Monitoring for Industrial Autonomous Transfer Vehicles Utilizing Edge Artificial Intelligence” başlıklı makale Sensors dergisinde yayınlandı.
Endüstri 4.0 kavramının hayatımıza girmesiyle üretimde teknolojinin entegrasyonu büyük bir ivme kazanmıştır. Akıllı üretim ortamlarında insan operatörler daha karmaşık ve uzmanlık gerektiren görevlere atanırken rutin ya da tehlikeli görevler, ağ ve iletişim teknolojileriyle haberleşebilen cihazlarla gerçekleştirilmektedir. İnsan operatörlere nazaran daha tutarlı olan ve hayati açıdan riskli görevleri de başarıyla yerine getirebilen bu cihazların durumlarının anlık olarak takibinin yapılması kritiktir. Ekipman çalışma süresindeki herhangi bir plansız kesinti, üreticilerin üretim döngü süreçlerini, üretim kapasitesini ve en önemlisi de müşterileri için güvenilirliğini tehlikeye atabilmektedir. Bu problemlerin üstesinden gelebilmek için işletmeler, akıllı üretim teknolojilerinden faydalanarak atölyede yer alan cihazların uçtan uca sürekli olarak izlenmesini sağlayan ve arızaları oluşur oluşmaz tespit ederek uyarı verebilen otomasyon sistemlerini geliştirmeye ve üretim ortamlarına entegre etmeye çalışmaktadır.
Üniversitemiz Mühendislik Mimarlık Fakültesi Bilgisayar Mühendisliği Bölümü öğretim üyesi Dr. Öğr. Üyesi Eyüp Çinar’ın yürütücüsü olduğu TÜBİTAK 2232 - Uluslararası Lider Araştırmacılar Programı (Proje No - 118C252) kapsamında desteklenen ortak projeden üretilen “Real-Time Fault Detection and Condition Monitoring for Industrial Autonomous Transfer Vehicles Utilizing Edge Artificial Intelligence” başlıklı bu makalede, akıllı üretim sistemlerinin vazgeçilmez bir parçası olan robotların gerçek zamanlı olarak durumlarının takibi ve robotlarda ortaya çıkabilecek olan arızaların/hataların etkin bir şekilde tespiti için birçok farklı robotun kolaylıkla entegre edilebildiği ve uç yapay zekâ tekniklerinden faydalanan esnek bir sistem mimarisi önerilmiştir.
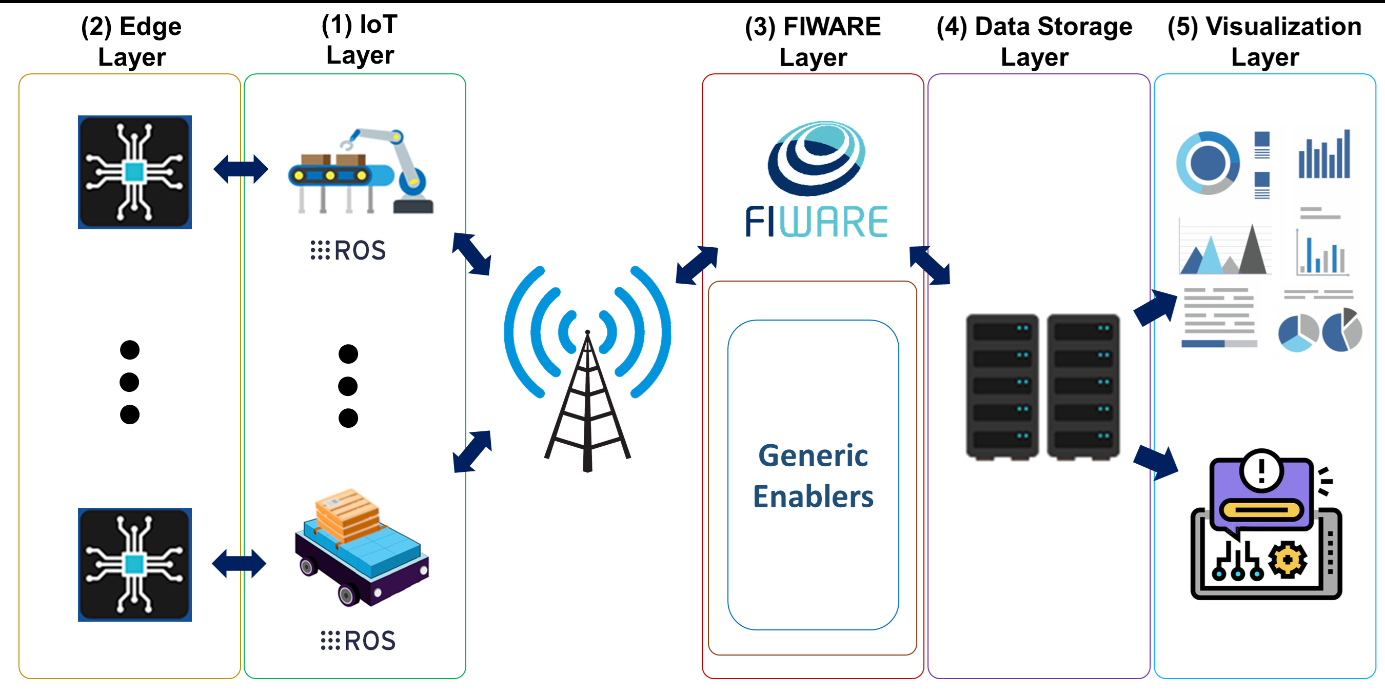
Çalışma kapsamında önerilen mimari beş farklı katmandan oluşmaktadır. Üretim ortamında çalışan cihazlardan anlık olarak toplanan veriler, uç yapay zekâ aygıtlarıyla gerçek zamanlı olarak analiz edilmektedir. Sonrasında ise analiz sonuçları ve toplanan veriler FIWARE arakatmanı ile bir depolama ünitesine aktarılarak gösterge panelleri yardımıyla görselleştirilmekte ve gerekli durumlarda sorumlu kişilere uyarı mesajları iletilmektedir. Önerilen mimari, beklenmeyen bir durumla karşılaştıklarında kendi kararlarını kendileri vererek istenen görevleri yerine getirebilen otonom taşıyıcı araçların (OTA) yer aldığı bir senaryo ile test edilmiştir. Testler, üniversitemiz Akıllı Sistemler Uygulama ve Araştırma Merkezinde yer alan gerçek bir endüstriyel üretim ortamına oldukça benzer bir laboratuvar ortamında gerçekleştirilmiştir.
Gerçekleştirilen testlerde, OTA’dan elde edilen ses ve titreşim verileri, uç yapay zekâ katmanına aktarılarak analiz edilmiştir. Analiz sürecinde; çoklu heterojen sensörlerden faydalanan ve çevrim dışı olarak eğitilen bir derin öğrenme modeli, uç yapay zekâ birimine gömülerek gerçek zamanlı verilerin işlenmesine olanak tanınmıştır. Bu yaklaşım hem verilerin gerçek zamanlı olarak analizini sağlamakta hem de alışılmış yöntemlere kıyasla zaman ve kaynak tüketimini oldukça azaltmıştır. Ayrıca, analiz sonuçları ve OTA’dan toplanan veriler FIWARE katmanı aracılığıyla veri depolama katmanına aktarılmıştır. Son olarak ise veri depolama katmanında yer alınan veriler görselleştirme katmanına aktarılarak gösterge panolarıyla durum takibi için son kullanıcılara sunulmuştur. Çalışmada hesaplanan metriklerden ağ bant genişliği kullanımının alışılmış yaklaşımlara göre 43 kat ve toplam geçen veri aktarım süresinin de 37 kat azaltıldığı görülmüştür.
Çalışmanın sonucunda, önerilen mimarinin ve uç yapay zekâ analiz yaklaşımının OTA test senaryosunda gerçek zamanlı operasyonlar için önemli ölçüde performans sağladığı görülmüştür. Önerilen yaklaşım, gerçek zamanlı hata teşhisi ve durum takibi için etkin bir çözüm üretmekle birlikte farklı endüstriyel cihazlar için uyarlanabilir ve esnek bir çatı oluşturabildiğinden üretim ortamlarında operasyonel verimliliği artırmak için gerçek hayat problemlerine entegre edilebilecek düzeydedir.
Makaleye erişim: Sensors


ESOGÜ Gündem
31 octobre 2024Kula’daki Magma Odalarında Jeotermal Enerji Potansiyeli | Prof. Dr. Özgür Karaoğlu





